

事業報告
【電気科】画像認識による自動運転技術学習②~マイコンカーラリー・カメラクラスへの取組み~
投稿日時 : 2021/10/20
 od52
od52
前回に引き続き、マイコンカーラリー・カメラクラスへの取組みを掲載します。
前回記事:画像認識による自動運転技術学習①
今回使用しているマイコンカーは、搭載されているカメラによりコースを識別していきます。
カメラのデータをコンピュータで処理し、コースにある白いラインに沿って走行するプログラムが組み込まれています。
プログラムはサンプルプログラムを調整したものです。
①カメラによる画像処理について
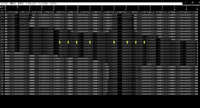
「Tera Term」というソフトを利用し、カメラがどのように画像処理をしているか確認することができます。
プログラムによって2値化し、白を「1」、黒を「0」として判断しています。
「Tera Term」の画面の黄色い箇所が8つありますが、その場所の値をマイコンに入力信号として取り込み、走行プログラム(直進、カーブ走行等)を組んでいます。
つまり、車体の先に8ビットの光センサがついているのと同じように考えることができます。
 |
直線コース |
カメラで直線を認識たデータ(Tera Term) |


|
クロスラインコース |
カメラでクロスラインを認識したデータ(Tera Term) |


(※写真クリックで動画が別ウインドウで開きます。)
②マイコンカー・カメラクラス走行動画
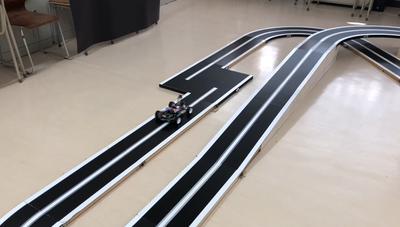
(※写真クリックで動画が別ウインドウで開きます。)
本サイトの文章・画像などの無断での複製、転載を禁じます。
いじめ防止基本方針
令和5年度本校のいじめ防止基本方針については以下のファイルをご確認ください。
スクール・ポリシー
本校のスクール・ポリシーについて以下のファイルを御参照ください。
カウンタ
1
4
4
5
8
9
4
アクセス
福島県南相馬市小高区吉名
字玉ノ木平78
TEL:0244-44-3141(代)
FAX:0244-44-6687
Eメール odakasangyogijutsu-h@fcs.ed.jp